用 3D Gaussian Splatting 重建城市建筑几何

城市风环境 CFD 模拟的一个前置难题,是如何快速得到既接近真实建筑形态、又适合网格划分和数值计算的城市建筑几何。传统手工建模耗时较长,普通 GIS 拉伸模型细节不足,而点云到几何模型的自动转换又容易受到植被、孔洞、突起和屋面细节缺失的影响。
在这篇发表于 Sustainable Cities and Society 的论文中,我们把 3D Gaussian Splatting 引入城市建筑几何重建流程,尝试从无人机影像出发,快速生成可用于城市风场模拟的建筑几何模型。对 WOEAI 的数值风洞研究来说,这项工作连接了“视觉数据获取”“城市几何重建”和“CFD 风环境评估”三个环节。
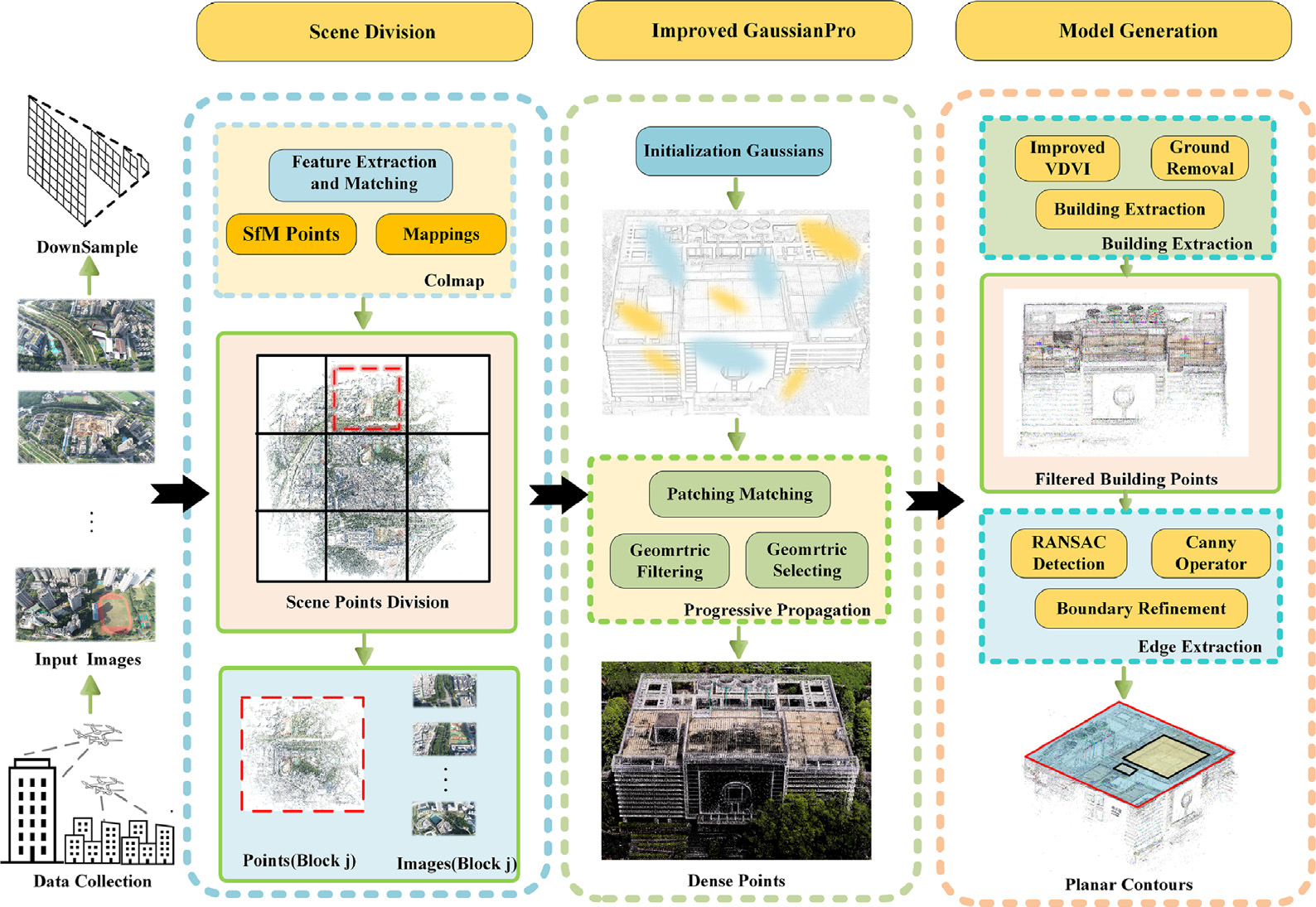
论文图 1 算法框架总体流程
这张图展示了从无人机影像、场景分块、改进 GaussianPro 到建筑模型生成的完整路径,说明本文并不是只做视觉重建,而是面向 CFD 可用几何模型来组织算法。
论文信息
论文题名: A novel framework utilizing 3D Gaussian Splatting to construct building geometry for urban wind simulations
作者: ; Li Chao*; Jiang Jianxun; Chen Lingwei; Wang Xiaolu
期刊: Sustainable Cities and Society
年份: 2025
WOEAI 相关方向: 建筑结构抗风 / 数值风洞与湍动入流
三句话导读
这篇论文研究如何用 3D Gaussian Splatting 从无人机影像快速生成城市风环境 CFD 可用的建筑几何。 它重要,因为城市风场模拟的成本常常先卡在几何建模和网格前处理,而不是求解器本身。 读者可以带走的结论是:面向 CFD 的几何重建既要快,也要规则、可网格化,并且要通过网格收敛和风环境分析验证可用性。
关键数字 / 关键结论卡
相比 COLMAP,本文框架的点云精度平均提高约 \(12\%\);结论部分概括密集建筑点云生成速度比传统方法快 \(2\)-\(3\) 倍。
生成建筑几何达到 LoD2 和 LoD2.5,并强调规则边界和网格质量,而不只是视觉重建效果。
CFD 网格收敛分析中,速度场与压力场最大 GCI 为 \(3.76\%\),湍流量最大 GCI 为 \(4.89\%\)。
摘要
计算流体力学(CFD)模拟是城市风环境评估中的重要方法。快速、准确地建立细致的建筑几何模型,是开展高质量 CFD 模拟的关键前提。利用点云生成这类模型是主流方法之一,但现有方法对建筑点云生成的效率和精度关注不足,在建立几何拓扑时也难以提取足够细节,因此生成的几何模型并不适合直接用于 CFD 模拟。
针对这些问题,本文提出一种基于 3D Gaussian Splatting 的算法框架。首先,利用无人机拍摄影像并通过 COLMAP 生成稀疏点;随后,提出一种基于这些稀疏点的场景分割方法,将整体场景划分为均匀区块。本文首次引入并改进 3D Gaussian Splatting,以显著提升速度的方式生成高精度建筑点云。
此外,研究设计了一套集成算法,用于从点云中提取植被、地形和建筑,再对建筑轮廓进行简化和细化,生成适合 CFD 模拟的几何模型。与传统方法相比,该框架能够将场景扩展到城市尺度,并支持可调节的细节水平。点云精度平均提高 \(12\%\),生成速度提升 \(3\)-\(5\) 倍,几何模型细节水平达到 LoD2 和 LoD2.5,并可通过定制飞行规划进一步提升。最后,研究开展了基于 CFD 模拟的行人舒适度分析和 WebGIS 可视化,模拟结果呈单调收敛,压力场网格收敛指数达到 \(3.76\%\)。这些结果表明,该算法框架适用于典型城市风场模拟。
研究问题
城市建筑几何重建要服务风环境计算,而不仅是视觉展示。本文围绕三个问题展开:
如何从无人机影像出发,快速生成城市尺度的高精度建筑点云?
如何把点云进一步整理为边界清晰、屋面细节可控、适合 CFD 网格划分的建筑几何模型?
如何用 CFD 网格收敛、行人舒适度分析和 WebGIS 展示验证这些几何模型的工程可用性?
方法贡献
本文提出的框架由两个核心部分组成:密集点云生成和建筑几何模型生成。
第一步是场景分块。我们先使用 COLMAP 从无人机影像中得到 SfM 稀疏点云以及二维特征点与三维点之间的映射关系,再根据这些映射关系把整个场景划分为多个区块。这样做的目的,是让城市尺度场景可以被分块训练和并行处理,缓解大场景重建中的内存和时间压力。
第二步是改进 3D Gaussian Splatting。我们以 GaussianPro 为基础,将场景表示为不断优化和加密的高斯点,通过 patch matching、geometric filtering、geometric selecting 和 progressive propagation 等过程提升建筑点云质量。与直接追求视觉渲染不同,本文更关注重建结果能否支撑后续建筑轮廓提取和 CFD 几何建模。
第三步是几何模型生成。研究用改进的 VDVI、地面去除、建筑提取、RANSAC、Canny 算子和边界细化等步骤,将点云中的植被、地形与建筑分离,并将建筑屋面轮廓整理成更规则的几何模型。
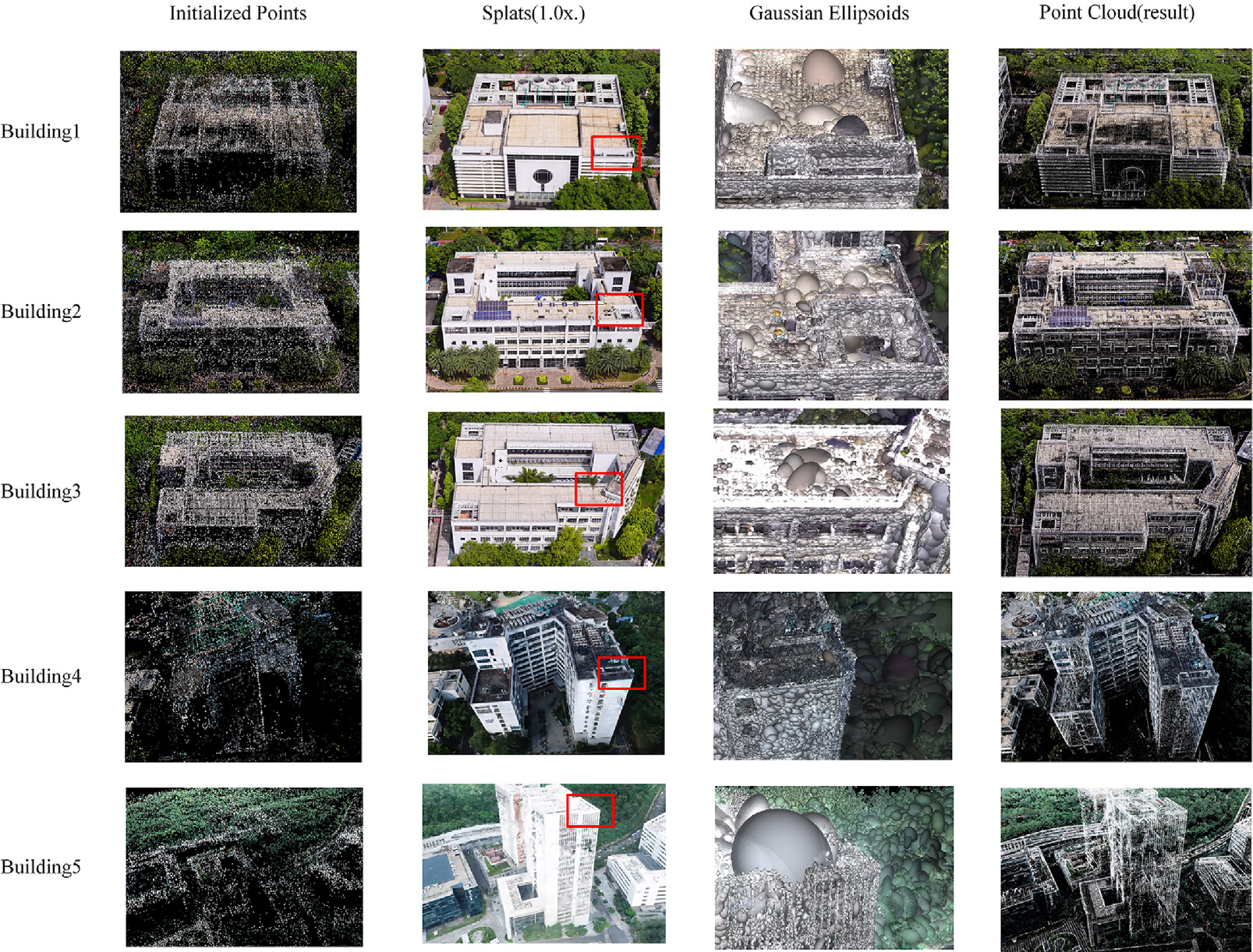
论文图 14 选定建筑的密集点云
图中从初始化点、splat 渲染、高斯椭球到最终点云展示了 3DGS 如何逐步获得建筑细节,也提示了屋面、立面遮挡和背景颜色对点云质量的影响。
关键发现
1. 点云精度和生成效率同时改善
针对问题 1,论文用同一数据集比较了本文框架与 COLMAP、Context Capture、NeuS、NeuDA 等方法。 结果显示,本文方法相对 COLMAP 的点云精度平均提高约 \(12\%\),并且在生成速度上明显更快。结论部分进一步概括为:密集建筑点云生成速度比传统方法快 \(2\)-\(3\) 倍,同时保持较高精度。
这组结果的意义在于,城市风环境模拟通常不是单体建筑问题,而是建筑群和街区尺度问题。只有点云生成效率足够高,几何重建流程才有可能进入更大范围、更频繁更新的城市风环境评估。
2. 几何模型达到 LoD2 和 LoD2.5,并更适合 CFD
针对问题 2,从重建结果看,本文框架生成的建筑几何模型具有较规则的平面轮廓,能够保留主要屋面细节,并避免尖角、凹凸不平等可能导致 CFD 计算发散的问题。 论文报告几何模型的细节水平达到 LoD2 和 LoD2.5。
这也是本文和纯视觉重建工作的区别之一:视觉上更“像”的模型,不一定更适合 CFD;而 CFD 需要的是能够表达主要建筑外形、边界清晰、网格质量可控的几何。
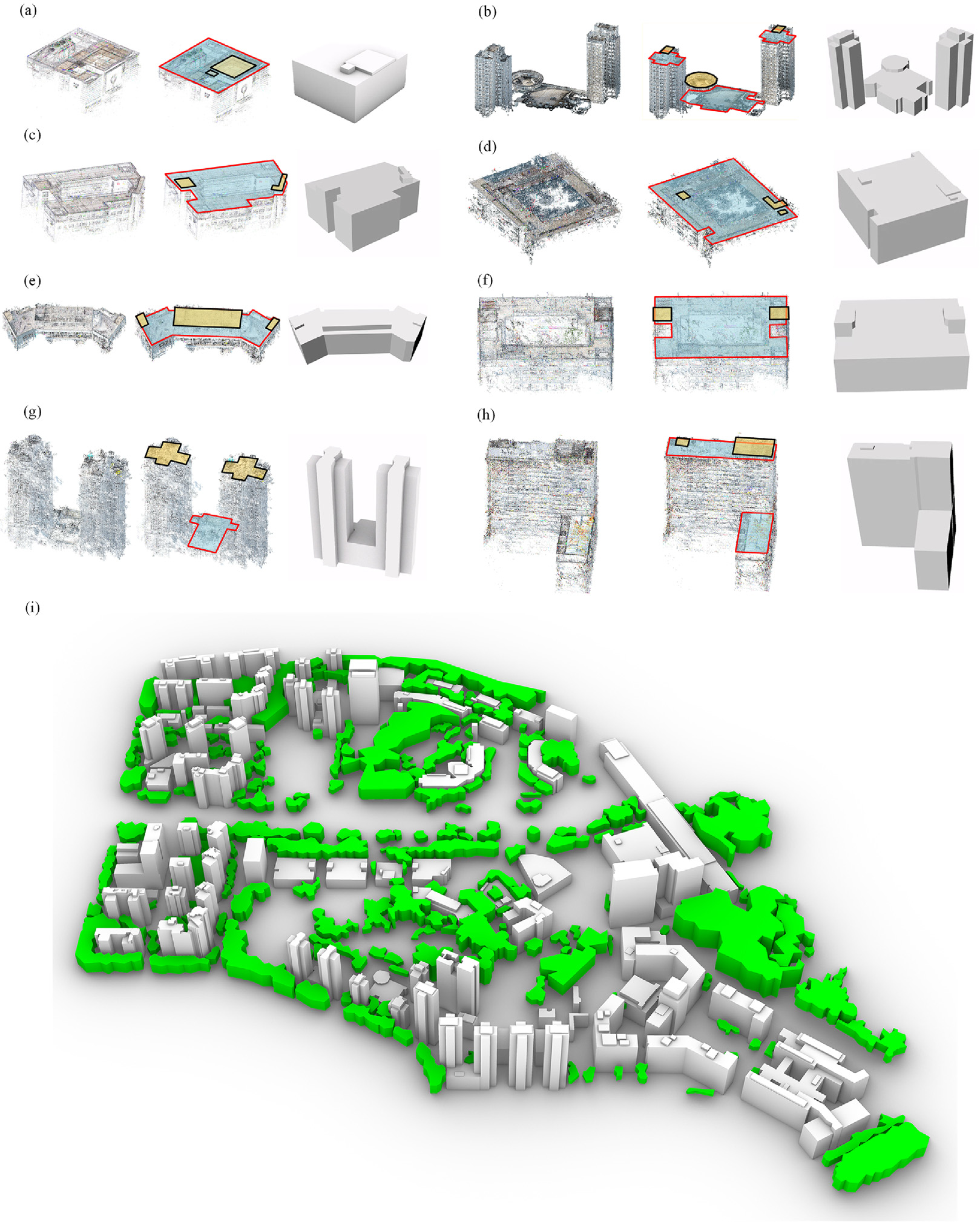
论文图 18 几何模型重建结果
这张图把建筑点云、平面轮廓和几何模型并列展示,并给出整体场景结果,说明框架如何从点云走向可用于风场模拟的城市几何。
3. CFD 应用显示网格收敛和风场连续性
针对问题 3,为了验证几何拓扑的有效性,论文进一步开展三维不可压缩牛顿流体模拟,采用 :math:`k`-:math:`omega` SST RANS 湍流模型求解稳态速度和压力。 计算域按照最高建筑高度 \(H_{\mathrm{max}}\) 设置:上游方向取 \(5H_{\mathrm{max}}\),侧向取 \(5H_{\mathrm{max}}\),下游取 \(15H_{\mathrm{max}}\),高度取 \(6H_{\mathrm{max}}\);加密区覆盖研究区域内所有建筑,直径为 \(20H_{\mathrm{max}}\)、高度为 \(2H_{\mathrm{max}}\)。
网格收敛分析中,粗、中、细三套网格的单元数分别约为 \(7.9\) 百万、\(16.8\) 百万和 \(37.9\) 百万。论文报告速度场与压力场的最大 GCI 为 \(3.76\%\),湍流量最大 GCI 为 \(4.89\%\),并据此选择基础网格用于后续工况和行人舒适度评估。
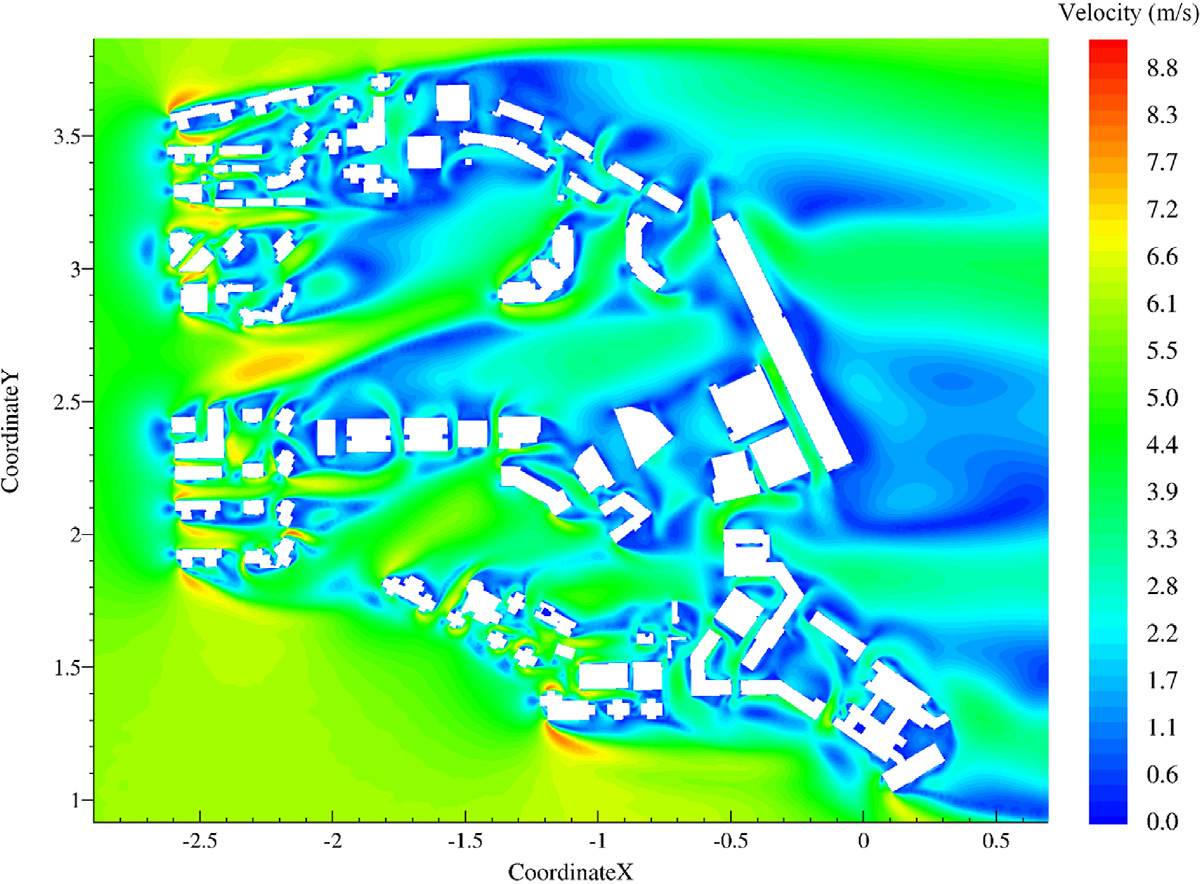
论文图 25 研究区域 2 m 高度处的速度幅值
速度场显示了建筑边缘、狭窄通道和开阔区域的风速差异,把几何重建结果进一步连接到行人高度风环境分析。
4. 行人舒适度和 WebGIS 展示把框架推向应用环节
针对问题 3,在行人舒适度分析中,论文基于附近气象站的长期风速风向数据、Weibull 分布、POT 方法和 CFD 风速比结果,对 :math:`30` 个监测点进行分类。 结果显示,多数监测点属于 I 类和 II 类,满足行人舒适度要求;少数点位达到 III 类或 IV 类,原因与小建筑、狭窄通道和通道加速效应有关。
论文还将建筑几何和 CFD 风场结果与 Cesium、GeoServer、WebGIS 展示流程连接起来,对风场数据进行插值和可视化。这一步不是说平台功能已经完全工程化,而是展示了从“自动几何重建”到“风场数据库与可视化表达”的应用可能性。

论文图 34 风场插值结果
WebGIS 视图把建筑几何、插值后的风场分布和底图放在同一空间语境中,便于后续工程沟通、规划评估和灾害研究场景继续扩展。
工程意义
这项工作的工程意义,在于为城市风环境模拟提供了一条更自动化的前处理路线。
过去,城市 CFD 评估常常把大量时间花在建筑几何建模、清理和网格前处理上。本文的框架尝试从无人机影像快速生成点云,再从点云提取建筑几何,并用 CFD 和网格收敛验证这些几何是否可用。对数值风洞工作来说,这相当于把“真实城市影像”向“可计算城市模型”推进了一步。
对 WOEAI 的研究方向来说,这篇论文也和多个后续问题相连:
城市风环境评估中的快速几何更新;
数值风洞前处理自动化;
建筑群和街区尺度 CFD 模型生成;
行人风环境、局地强风和舒适度分析;
城市风场数据在 WebGIS 或工程平台中的表达;
与后续 AI 代理模型、预计算 CFD 数据库或数字孪生流程结合。
适用边界
这项研究并不意味着 3DGS 可以在所有城市环境中无条件生成完美 CFD 几何。论文也明确给出了几个限制。
首先,当建筑颜色接近背景颜色、颜色变化不明显,或者存在强光、阴影、植被遮挡时,点云细节仍然可能丢失。其次,当前几何模型生成算法主要关注建筑部分,而植被和地形对城市风环境也很重要,后续仍需要进一步纳入几何建模流程。第三,对于形态复杂的建筑和高密度居住区,建筑点云可能相互连接,导致单体建筑分离和几何生成效果下降。
因此,更准确的理解是:本文框架适合为典型城市风场模拟提供更快、更可用的建筑几何生成路径,但在复杂建筑、密集街区、特殊光照和高风险工程场景下,仍需要人工复核、数据质量控制和专项 CFD 验证。
延伸阅读
完整引用
[60] ; Li Chao*; Jiang Jianxun; Chen Lingwei; Wang Xiaolu, A novel framework utilizing 3D Gaussian Splatting to construct building geometry for urban wind simulations[J]. Sustainable Cities and Society, 2025, 123: 106237. https://doi.org/10.1016/j.scs.2025.106237.
收录信息见 WOEAI 学术成果页对应条目。